

技术文章
技术文章
LabJack 数据采集卡可用于控制各种类型的电机,包括步进电机和PID 控制器
LabJack 设备可用于控制各种类型的电机,包括步进电机和PID 控制器。此外,LabJack 设备可以输出 PWM 信号,用于精确的占空比控制、电压调节和电机速度控制,以在低速时实现最大扭矩。 www.pc17.com.cn
将步进电机连接到 T 系列 LabJack数据采集卡的方法
设备
要使用 LabJack 成功连接和操作步进电机,您需要以下材料:
带 USB、以太网或 WiFi 的计算机
LabJack T4 或 T7
PS12DC - 电源开关板
单极步进电机
PS12DC 每通道可处理高达 28V 的 750mA 电流,因此大多数 NEMA17 单极步进电机都可以工作。始终使用 PS12DC 数据表验证电机额定值。
双极电机将无法工作,因为它们需要 2 组 H 桥,而 PS12DC 只是一个高侧开关器件,因为它使用 P 沟道 MOSFET。
电源
这里我们将使用 12VDC,但任何不超过 PS12DC 额定值的都可以
连接线
基本连接
首先按照PS12DC 数据表中的说明将 PS12DC 连接到您的 LabJack 。如上所述,一个普通的两相单极步进电机应该总共有六个引线,每个相位有两个线圈端和中心抽头。将其中一相的两个线圈端连接到 PS12DC 上的 S0 和 S1,并将线圈的中心抽头连接到 GND1。同理,将另一相的两个线圈端接S2、S3,接第二相的中心抽头GND2。然后,将 VS1 连接到 VS2,将 GND1 连接到 GND2。最后,VS1接12V电源正极,GND1接12V电源负极。
笔记:可以使用位于 PS12DC 同一块中的任何一对 S 通道并具有相同的操作。默认的 LUA 脚本 unipolar_full_step.lua 和 unipolar_half_step.lua 使用 S0+S1 和 S4+S5 作为 I/O 通道,所以在加载和使用它之前确保用您的应用程序特定的 S 通道更新 LUA 脚本。
PS12DC 的每个 S 通道对应一条 LabJack 数字 I/O 线。通过将给定 S 通道的相应 I/O 线设置为高电平,来自电源的 12V 将被引导通过该 S 通道。因此,用户可以通过简单的 I/O 线路切换,以编程方式选择何时为每个线圈端完全通电。S0:S7 对应 EIO0:EIO7,S8:S11 对应 CIO0:CIO3。
识别线索
万用表可用于将每相的引线识别为线圈端或中心抽头。一种方法是测量不同导线对之间的电阻。两个线圈端引线之间的电阻应是线圈端引线与中心抽头引线之间电阻的两倍。通过测试几对引线之间的电阻,您应该能够推断出哪些是中心抽头,哪些是线圈末端,并能够在上面的配置中连接它们。
用 LabJack 控制步进电机
要控制步进电机,数字 I/O 线路状态需要以特定模式从上述驱动模式之一高速切换。虽然这些波形可以通过直接从计算机设置 I/O 线来创建,但利用 LabJack 的 Lua 脚本功能并创建混合应用程序更有效,其中一些逻辑在主机上并具有步进电机控制代码直接在 T 系列设备上执行。以下功能框图概述了如何使用 LabJack 控制步进电机:
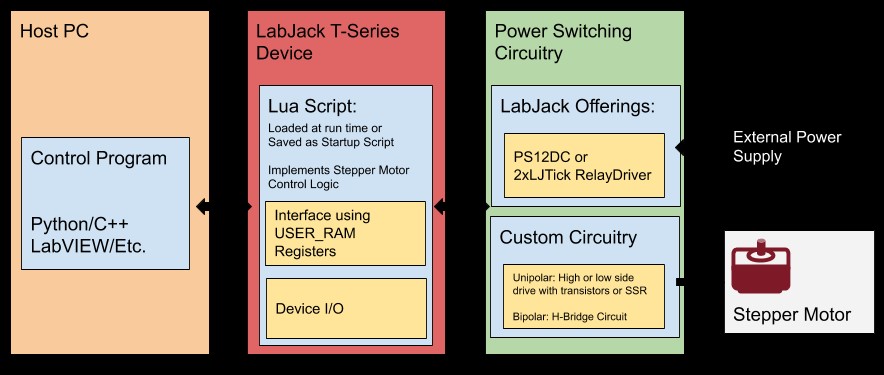
在较高层次上了解需要完成的工作后,可以遵循以下基本工作流程:连接到设备、配置设备和控制设备。
连接到 LabJack
大多数 LabJack 应用程序的第一步是使用 LJM 库打开到设备的连接。这是利用 LJM_Open 函数完成的,该函数可以传递设备类型、表示设备序列号或 IP 地址的标识符以及打开特定设备的连接类型。打开函数也可以用 LJM_Open(LJM_dtANY, LJM_ctANY, LJM_idANY,...) 调用,它将打开任何连接的设备。打开与设备的连接后,open 函数将返回一个句柄,然后可使用该句柄为应用程序主体读取或写入 LabJack 设备。应用程序主体完成后,最好使用该 LJM_Close函数关闭与设备的连接。有关连接到 LabJack 设备的更多信息。
为步进电机控制配置 LabJack
要将 LabJack 配置为单极步进电机控制器,首先将 LUA 脚本 unipolar_full_step.lua 或 unipolar_half_step.lua(源代码可在我们网站的Lua 脚本示例部分找到)加载并运行到 LabJack 上并保存脚本作为开机默认值。有关将 LUA 脚本加载和保存到 LabJack 的指南,请参阅独立 Lua 脚本教程。脚本也可以通过外部程序加载,如此处的 python 示例所示以及下面讨论的 LabVIEW 示例。这些 lua 脚本从上面的连接指南中声明 FIO 通道,然后定义数组来标识线圈端引线应通电的顺序,以便在全步或半步模式下成功地将电机移动所需的步数。然后,LUA 脚本声明了以下 USER_RAM 寄存器,可以通过外部程序修改这些寄存器以控制电机:
USER_RAM1_I32( 46080): 目标位置(步数)
USER_RAM2_I32( 46082): 当前位置(步数)
USER_RAM0_U16( 46180):启用(1 = 启用,0 = 禁用)
USER_RAM1_U16( 46181): 急停(1 = 急停,0 = 运行)
USER_RAM2_U16( 46182): 保持位置(1 = 锁定电机位置,0 = 当前移动后释放电机)
USER_RAM3_U16( 46183): 设置主页(1 = 将当前位置设置为 0 步位置) 了解基本脚本后,可以开发高级脚本,实现更高级的应用,例如:
使用旋转电机时,可以按度数跟踪位置。
如果步进电机控制线性滑块,则可以通过距离跟踪位置。
在一个方向上全速移动电机。
将步进电机连接到 T 系列 LabJack数据采集卡的方法
设备
要使用 LabJack 成功连接和操作步进电机,您需要以下材料:
带 USB、以太网或 WiFi 的计算机
LabJack T4 或 T7
PS12DC - 电源开关板
单极步进电机
PS12DC 每通道可处理高达 28V 的 750mA 电流,因此大多数 NEMA17 单极步进电机都可以工作。始终使用 PS12DC 数据表验证电机额定值。
双极电机将无法工作,因为它们需要 2 组 H 桥,而 PS12DC 只是一个高侧开关器件,因为它使用 P 沟道 MOSFET。
电源
这里我们将使用 12VDC,但任何不超过 PS12DC 额定值的都可以
连接线
基本连接
首先按照PS12DC 数据表中的说明将 PS12DC 连接到您的 LabJack 。如上所述,一个普通的两相单极步进电机应该总共有六个引线,每个相位有两个线圈端和中心抽头。将其中一相的两个线圈端连接到 PS12DC 上的 S0 和 S1,并将线圈的中心抽头连接到 GND1。同理,将另一相的两个线圈端接S2、S3,接第二相的中心抽头GND2。然后,将 VS1 连接到 VS2,将 GND1 连接到 GND2。最后,VS1接12V电源正极,GND1接12V电源负极。
笔记:可以使用位于 PS12DC 同一块中的任何一对 S 通道并具有相同的操作。默认的 LUA 脚本 unipolar_full_step.lua 和 unipolar_half_step.lua 使用 S0+S1 和 S4+S5 作为 I/O 通道,所以在加载和使用它之前确保用您的应用程序特定的 S 通道更新 LUA 脚本。
PS12DC 的每个 S 通道对应一条 LabJack 数字 I/O 线。通过将给定 S 通道的相应 I/O 线设置为高电平,来自电源的 12V 将被引导通过该 S 通道。因此,用户可以通过简单的 I/O 线路切换,以编程方式选择何时为每个线圈端完全通电。S0:S7 对应 EIO0:EIO7,S8:S11 对应 CIO0:CIO3。
电源开关换向电路的另一个选择是我们的LJTick-RelayDriver。LJTRD 可以插入 LabJack,其 INA/INB 端子连接到任何数字 I/O 线路,如LJTick-Relay Driver Datasheet中所示。然后,电源的电源和地可以连接到LJTRD的VR和GNDR端。现在,与 PS12DC 类似,数字 I/O 线可以设置为高电平以关闭 LJTRD 内的固态开关,并将电源电压引导至相应的 RA/RB 端子。如果相位的线圈端连接到这些 RA 和 RB 端子,LJTRD 将允许用户决定何时为每个相位完全通电。也可以使用具有类似功能和额定值的任何其他固态继电器或晶体管。

识别线索
万用表可用于将每相的引线识别为线圈端或中心抽头。一种方法是测量不同导线对之间的电阻。两个线圈端引线之间的电阻应是线圈端引线与中心抽头引线之间电阻的两倍。通过测试几对引线之间的电阻,您应该能够推断出哪些是中心抽头,哪些是线圈末端,并能够在上面的配置中连接它们。
用 LabJack 控制步进电机
要控制步进电机,数字 I/O 线路状态需要以特定模式从上述驱动模式之一高速切换。虽然这些波形可以通过直接从计算机设置 I/O 线来创建,但利用 LabJack 的 Lua 脚本功能并创建混合应用程序更有效,其中一些逻辑在主机上并具有步进电机控制代码直接在 T 系列设备上执行。以下功能框图概述了如何使用 LabJack 控制步进电机:
在较高层次上了解需要完成的工作后,可以遵循以下基本工作流程:连接到设备、配置设备和控制设备。
连接到 LabJack
大多数 LabJack 应用程序的第一步是使用 LJM 库打开到设备的连接。这是利用 LJM_Open 函数完成的,该函数可以传递设备类型、表示设备序列号或 IP 地址的标识符以及打开特定设备的连接类型。打开函数也可以用 LJM_Open(LJM_dtANY, LJM_ctANY, LJM_idANY,...) 调用,它将打开任何连接的设备。打开与设备的连接后,open 函数将返回一个句柄,然后可使用该句柄为应用程序主体读取或写入 LabJack 设备。应用程序主体完成后,最好使用该 LJM_Close函数关闭与设备的连接。有关连接到 LabJack 设备的更多信息。
为步进电机控制配置 LabJack
要将 LabJack 配置为单极步进电机控制器,首先将 LUA 脚本 unipolar_full_step.lua 或 unipolar_half_step.lua(源代码可在我们网站的Lua 脚本示例部分找到)加载并运行到 LabJack 上并保存脚本作为开机默认值。有关将 LUA 脚本加载和保存到 LabJack 的指南,请参阅独立 Lua 脚本教程。脚本也可以通过外部程序加载,如此处的 python 示例所示以及下面讨论的 LabVIEW 示例。这些 lua 脚本从上面的连接指南中声明 FIO 通道,然后定义数组来标识线圈端引线应通电的顺序,以便在全步或半步模式下成功地将电机移动所需的步数。然后,LUA 脚本声明了以下 USER_RAM 寄存器,可以通过外部程序修改这些寄存器以控制电机:
USER_RAM1_I32( 46080): 目标位置(步数)
USER_RAM2_I32( 46082): 当前位置(步数)
USER_RAM0_U16( 46180):启用(1 = 启用,0 = 禁用)
USER_RAM1_U16( 46181): 急停(1 = 急停,0 = 运行)
USER_RAM2_U16( 46182): 保持位置(1 = 锁定电机位置,0 = 当前移动后释放电机)
USER_RAM3_U16( 46183): 设置主页(1 = 将当前位置设置为 0 步位置) 了解基本脚本后,可以开发高级脚本,实现更高级的应用,例如:
使用旋转电机时,可以按度数跟踪位置。
如果步进电机控制线性滑块,则可以通过距离跟踪位置。
在一个方向上全速移动电机。
北京迪阳世纪科技有限公司提供全系列产品 请看官网:www.pc17.com.cn
北京迪阳世纪科技有限责任公司 版权所有 © 2008 - 2018 著作权声明
010-62156134 62169728 13301007825 节假日:13901042484 微信号:sun62169728
地址:北京市西城阜外百万庄扣钟北里7号公寓
E_mail:sales@pc17.com.cn 传真: 010-68328400
京ICP备17023194号-1 公备110108007750![]()
010-62156134 62169728 13301007825 节假日:13901042484 微信号:sun62169728
地址:北京市西城阜外百万庄扣钟北里7号公寓
E_mail:sales@pc17.com.cn 传真: 010-68328400
京ICP备17023194号-1 公备110108007750